Nový mikrorobot je schopen autonomně fungovat v kapalinách po dobu několika měsíců. Přestože bylo jeho vyvinutí náročné, náklady na výrobu robota jsou velmi nízké.
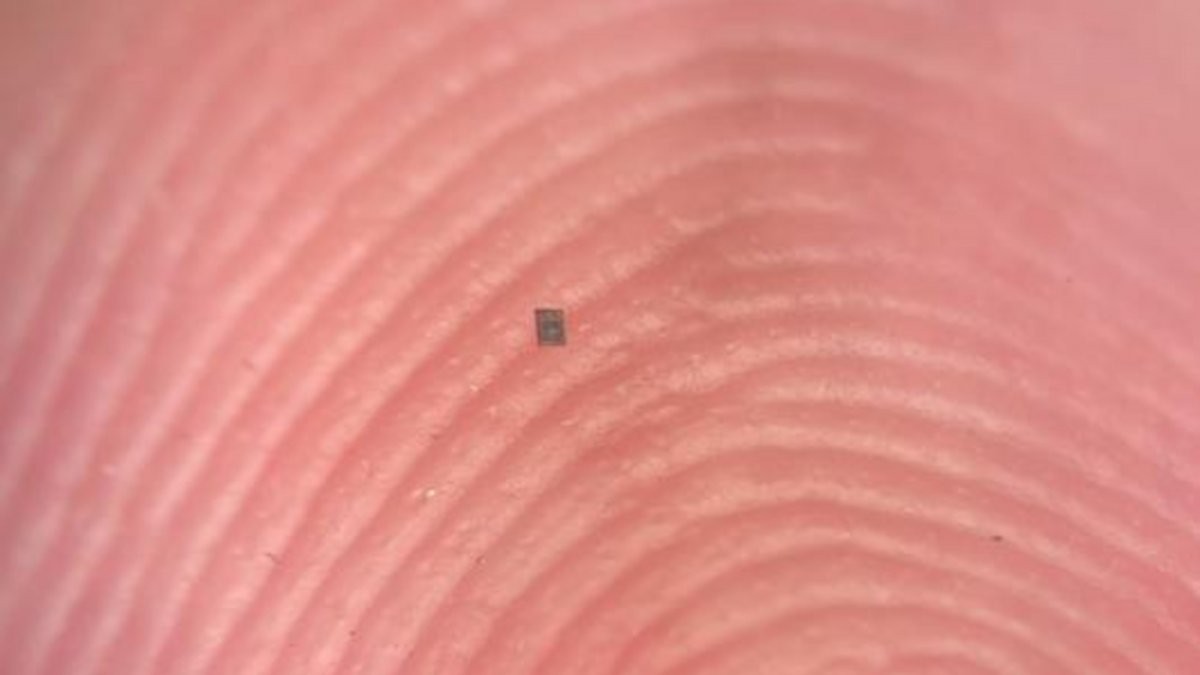
Tým vědců z University of Pennsylvania a University of Michigan vyvinul nejmenší zcela programovatelný autonomní robot na světě. Tento robot o rozměrech pouhých 200 µm x 300 µm x 50 µm dokáže vnímat své okolí a reagovat na něj. Napájen je miniaturními solárními články a je vybaven iontovým pohonem pro plavání.
Autoři studie, publikované v časopise Science Robotics, uvádějí, že do tohoto malého robota bylo integrováno velké množství technologií. Klíčovým prvkem robota je počítač, který vyvinul David Blaauw, profesor na University of Michigan, a který drží rekord za nejmenší počítač na světě. Marc Miskin, docent na University of Pennsylvania a vedoucí projektu mikrorobota, se setkal s Blaauwem před pěti lety na akci Defense Advanced Research Projects Agency (DARPA) a uvědomil si, že Blaauwův malý počítač je ideálním řešením pro mikrorobota.
Mikrokomputer pro mikrorobota
Spojení mikrokomputera a robota nebylo zcela bezproblémové, jelikož bylo nutné, aby oba prvky fungovaly synchronně. Vzhledem k tomu, že robot měl být autonomní, bylo obzvlášť složité zajistit jeho napájení. Vědci se rozhodli použít solární články, které produkují pouze 75 nanowattů energie, což je více než 100 000krát méně, než vyžaduje chytrá hodinka, jak vysvětluje Blaauw. To vedlo k potřebě přepracovat obvody existujícího mikrokomputera, aby bylo možné pracovat s extrémně nízkými napětími. Týmu se podařilo snížit spotřebu počítače tisíckrát.
Solární články však zaberou většinu prostoru robotu. To znamená, že pro procesor a paměť zbývá jen málo místa, a proto nemohly být zvětšovány. Vědci tak museli optimalizovat programování, aby se vešlo do omezené dostupné paměti. „Museli jsme úplně přepracovat pokyny počítačového programu a to, co by za běžných podmínek vyžadovalo mnoho pokynů pro řízení pohonu, jsme zhutnili do jediného specializovaného pokynu, abychom zkrátili délku programu tak, aby se vešel do malého prostoru robota,“ říká Blaauw.
Ovládání prostřednictvím světelných impulsů
Programování a přenos programu do počítače probíhá pomocí světelných impulsů. Každý robot má vlastní adresu, přes kterou se programování provádí. Tímto způsobem může být každý robot naprogramován pro různé úkoly a spolupracovat ve skupině, aby dosáhl společného cíle.
Součástí robotické elektroniky jsou také teplotní senzory, které dokážou měřit okolní teplotu s přesností až na třetinu stupně. Robot tak může rozpoznat a hlásit teploty, přičemž se může pohybovat směrem k vyšším teplotám nebo se od nich vzdálit. Díky tomu je možné monitorovat zdraví jednotlivých buněk, přičemž teplota slouží jako ukazatel jejich zdraví.
Teplota, kterou robot měří, je reprezentována jeho pohyby. Robot na základě pokynů provádí sérii pohybů, ve kterých je zakódována změřená teplota, a vědci ji následně dekódují přes mikroskop. Tato forma komunikace připomíná způsob, jakým včely sdělují informace jiným jedincům pomocí tance.
Iontový pohon bez mechanických částí
Aby se robot mohl pohybovat v kapalině, bylo zapotřebí vyvinout speciální koncepci pohonu, jelikož se na takto malého robota projeví síly závislé na objemu, jako je gravitace a setrvačnost. U mikrometrických robotů přebírají dominanci síly spojené s povrchem, jako je odpor a viskozita. Miskin uvádí: „Pohyb ve vodě je obdobou pohybu v dehtu.“ Vědci proto zavrhli mechanické pohony, které by bylo obtížné zmenšit na mikrometrickou velikost, a které by se navíc mohly snadno poškodit.
Vědci se tedy rozhodli pro iontový pohon, který nevyžaduje žádné mechanické součásti. Místo toho generuje elektrické pole, které uvolňuje ionty do kapaliny kolem robota, tlačí na blízké molekuly kapaliny a tím uvede kapalinu do pohybu. „Je to, jako by se robot nacházel v proudící řece,“ říká Miskin, „ale robot také ovlivňuje pohyb tohoto proudu.“
Tento efekt může být upraven změnami elektrického pole. Robot se tak může pohybovat ve složitých vzorcích rychlostí až jedné délky těla za sekundu. Systém pohonu je navíc velmi robustní, neboť neobsahuje mechanické části. Mikroroboti vybavení tímto pohonem mohou být např. zachyceni mikropipetou a přemístěni z jedné biologické vzorky do druhé, aniž by došlo k jejich poškození.
Robot je tak schopný se pohybovat v kapalině po dobu několika měsíců, pokud zachytává světlo prostřednictvím svých solárních článků. Osvětlení pomocí LED diod zajišťuje potřebnou energii. Robot není řízen zvenčí prostřednictvím magnetických polí, světla nebo rádiových signálů. Malý počítač, iontový pohon a solární články mu dávají možnost být zcela autonomní. Na vývoji tohoto autonomního mikrorobota pracovali vědci celkem pět let.
Náklady na jeden americký cent
Miskin říká: „Tohle je opravdu jen první kapitola. Ukázali jsme, že je možné integrovat mozek, senzor a motor do něčeho téměř příliš malého, než aby to bylo vidět, a že to může přežít a fungovat po měsíce. Jakmile máte tuto základnu, můžete přidávat všechny možné funkce a inteligenci. To otevírá dveře k úplně nové budoucnosti pro mikrorobotiku.”
Budoucí mikroroboti by mohli být ještě výkonnější, implementovat složitější programy, obsahovat nové senzory a rychleji se pohybovat v komplexnějších prostředích, dodávají vědci. Dosavadní platforma ukazuje, že to vše lze dosáhnout i za nízké náklady: aktuální robot je možné vyrobit za pouhý jeden americký cent.